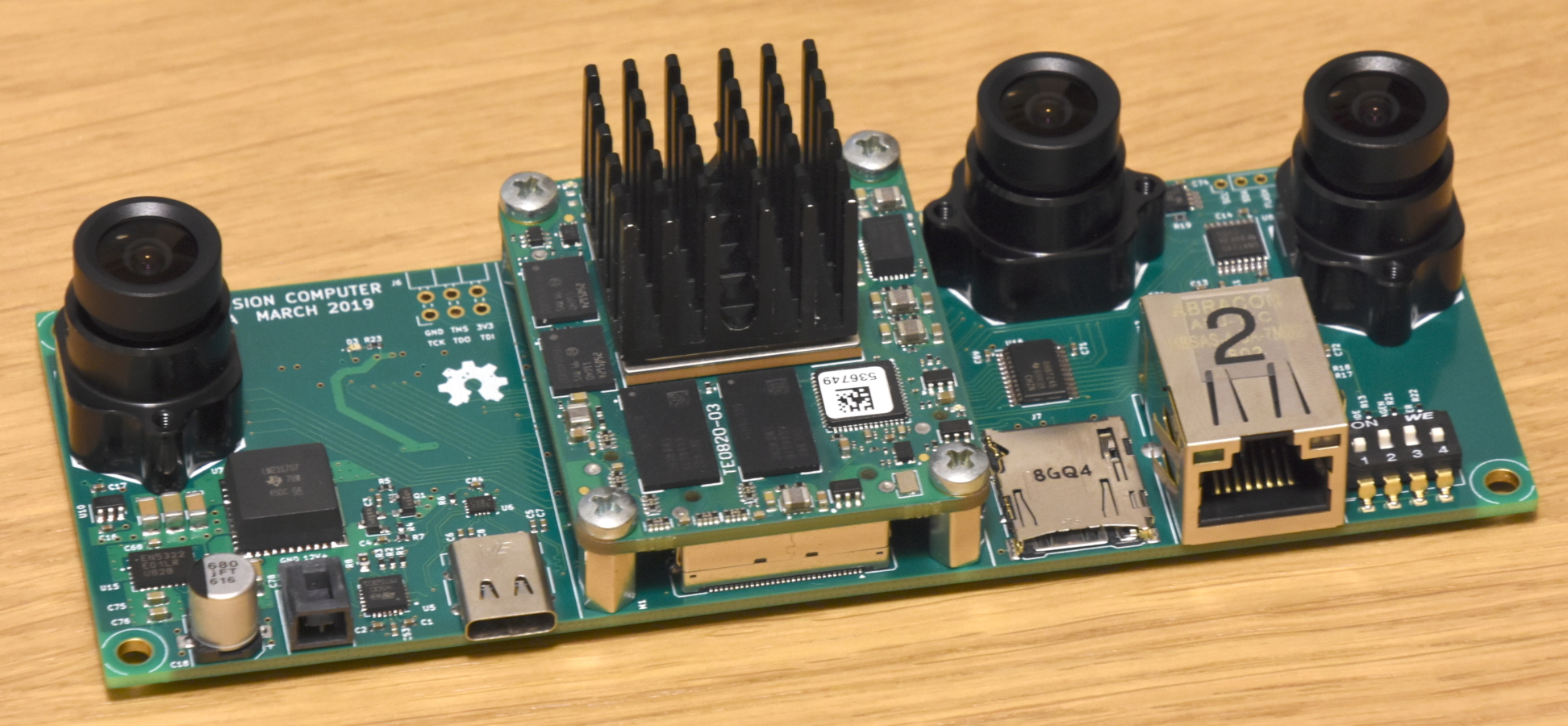
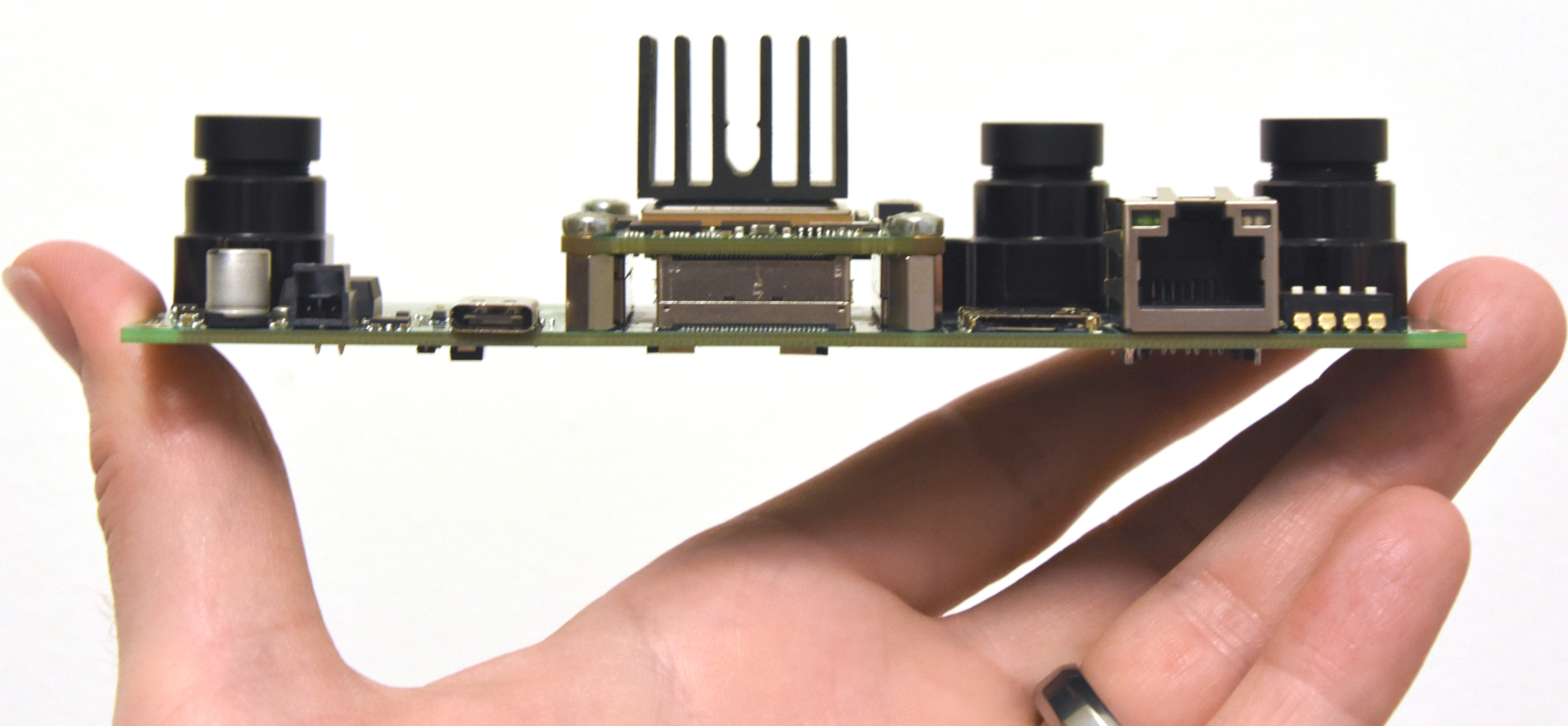
The Open Vision Computer (OVC) is a joint project between the Open Source Robotics Foundation (OSRF) and the GRASP Lab at the University of Pennsylvania. The goal of the project is to create an open-source computer vision platform for robotics.
For this project, I am focusing on accelerating vision algorithms using the onboard FPGA, as well as porting our lab Visual-Inertial Odometry stack to the platform towards a real-time implementation.
Star